バーチャルマーケット2022 Winterに合わせ、2022/12/17 (土) に、第4回 ニソコンVRが開催されました。
会場は、バーチャルマーケット2022 Winter内 Cosmotravel Elevator 「T-Omega – 覇者ノ残影」になります。vket終了後も再public化されたワールドでいつでも遊べます。
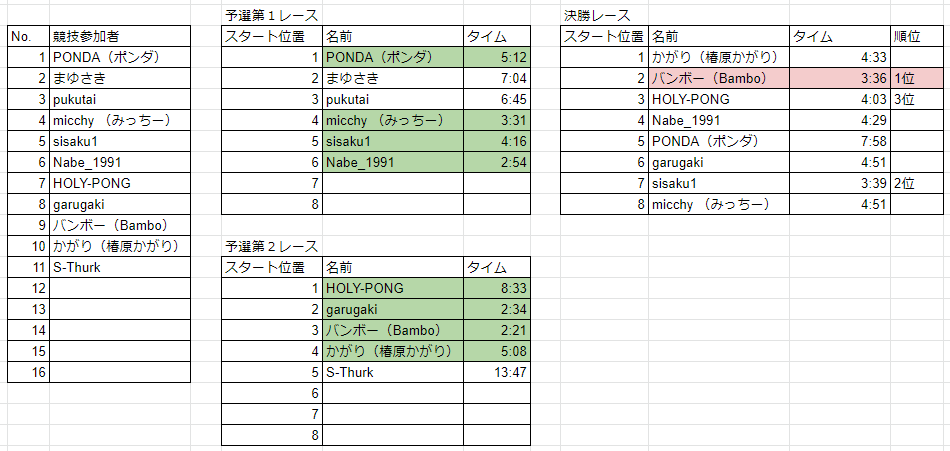
大会リザルト
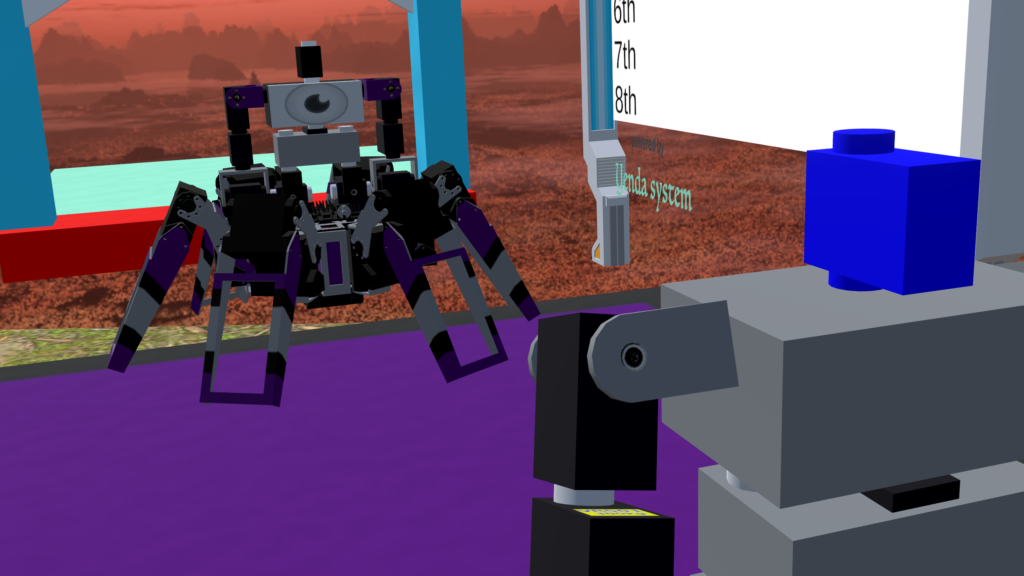
大会の優勝者は、イェンダシステムの開発者でもある、バンボー(Bambo)さん、予選では文句なしのタイム2:21でした!
優勝したバンボー(Bambo)さんには、スポンサー様より、医療用マスク1年分が贈られます!

タイムアタックコンテスト リザルト
期間中、Twitterで、タイムアタックコンテストを行いました。
20名以上の方にご参加いただきました。最速は、かがり(椿原かがり)さんの2分12秒でした!優勝したかがり(椿原かがり)さんには、スポンサー様より、医療用マスク1年分が贈られます!

タイムアタック(忍術あり)コンテスト
ROBO-NINJAには忍術(裏技等)が多数、存在します。
タイムアタック企画及び大会では体術のみを駆使し試練を突破させることであるため忍術は禁止ですが、一方で新忍術の第一発見者はその功績を称え、お名前をニソコン練習室のワールドに記念碑に刻ませていただきます。
- 忍術「時渡の術」開眼者:かがり(椿原かがり)さん タイム : 0分00秒
- 忍術「虹渡の術」開眼者:ちうさん タイム : 0分22秒
新忍術の発見、ありがとうございました!